Introduction
Maxwell’s equations are typically first learned in their integral form, describing electromagnetism over volumes and loops.
However, to understand field behavior at specific points we must convert them into their differential form.
This post provides a technical walkthrough of that conversion.
We will apply the two primary links between vector calculus and physical space:
- Gauss’s Divergence Theorem: To transform surface integrals into volume integrals.
- Stokes’ Theorem: To transform line integrals into surface integrals.
By shifting from global boundaries to local derivatives, we arrive at the four partial differential equations that define modern classical electrodynamics
Table: Maxwell Equations Integral and Differential Forms
Summary: Maxwell’s Equations
Table: Maxwell Equations
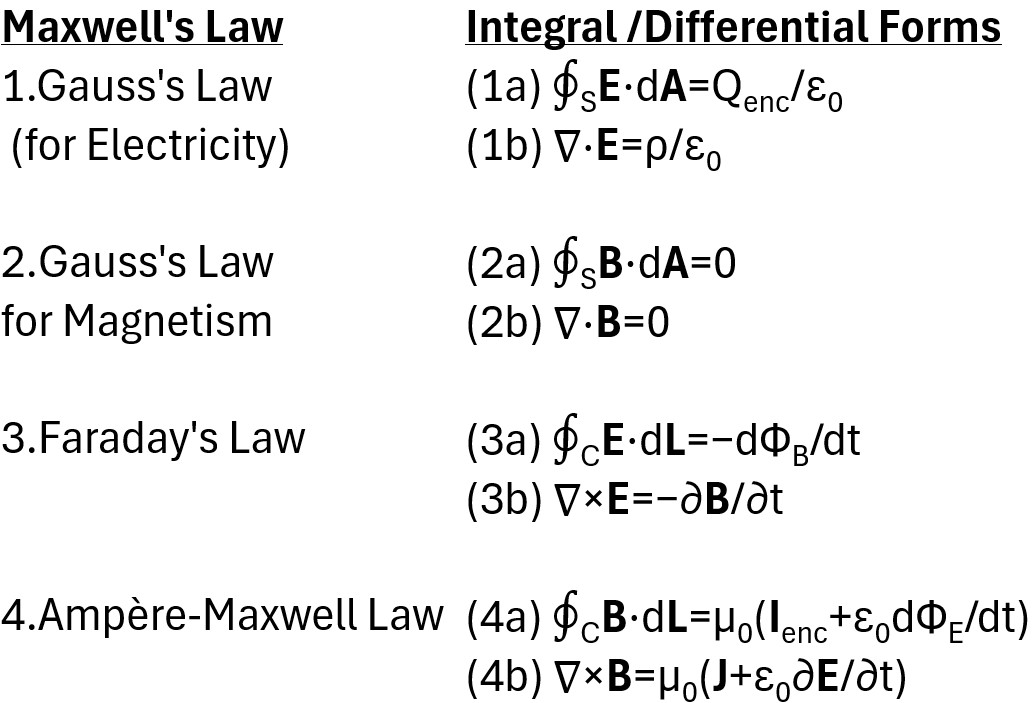
Maxwell Equations Integral and Differential Forms
1. Gauss’s Law for Electric fields
- Integral Form: ∮SE⋅dA=Qenc/ε0
- Differential Form: ∇⋅E=ρ/ε0
- Meaning: Electric charges produce an electric field.
2. Gauss’s Law for Magnetic Fields
- Integral Form: ∮SB⋅dA=0
- Differential Form: ∇⋅B=0
- Meaning: There are no magnetic monopoles; magnetic field lines are continuous loops.
3. Faraday’s Law
- Integral Form: ∮CE⋅dL=−dΦB/dt
- Differential Form: ∇×E=−∂B/∂t
- Meaning: A changing magnetic field induces an electromotive force (electric field).
4. Ampère-Maxwell Law
- Integral Form: ∮CB⋅dL=μ0(Ienc+ε0dΦE/dt)
- Differential Form: ∇×B=μ0(J+ε0∂E/∂t)
- Meaning: Magnetic fields are generated by moving charges (current) and changing electric fields.
Maxwell Equation Variables and Terms
- E / Electric Field / Volts per meter (V/m)
- B / Magnetic Flux Density (Magnetic Field) / Tesla (T)
- ρ / Total Charge Density / Coulombs per cubic meter (C/m³)
- J / Current Density / Amperes per square meter (A/m²)
- J is the flow of actual electric charges (like electrons in a wire) per unit area
- Qenc / Enclosed Electric Charge/Coulomb (C)
- Ienc / Enclosed Electric Current / Ampere (A)
- ΦE / Electric Flux / V⋅m
- ΦB / Magnetic Flux/Weber (Wb)
- ε0∂E/∂t / Displacement Current / Amperes per square meter (A/m²)
- Displacement current isn’t actually “current” (moving charges); it’s a changing electric field that acts like a current by producing a magnetic field.
- It’s Maxwell’s “mathematical glue” that ensures magnetic fields still exist in gaps—like between capacitor plates—where physical electrons aren’t flowing
Maxwell Equation Constants
- ε0 / Permittivity of Free Space/ 8.854×10−12 F/m
- μ0 / Permeability of Free Space/ 4π×10−7 H/m
- c / Speed of Light in Vacuum/ 299,792,458 m/s (c=1/μ0ε0)
Maxwell’s Equations Operators
- ∇
- Del (Nabla)
- Vector differential operator
- Represents the rate of change in 3D space.
- ∇⋅
- Divergence
- “Flux per unit volume”
- Measures if a field is “spreading out” from a point (source) or “shrinking” into it (sink).
- ∇×
- Curl
- “Rotation”
- Measures the tendency of a field to circulate or “spin” around a point.
- ∂/∂t
- Partial Time Derivative
- Temporal change
- Measures how the field changes at a fixed point as time passes.
- ∮S
- Surface Integral
- Total flux through a surface
- Sums the field components passing perpendicularly through a closed surface.
- ∮C
- Line Integral
- Circulation around a path
- Sums the field components tangent to a closed loop.
- dA
- Differential Area
- Vector Surface element
- A vector normal (perpendicular) to the surface.
- dL
- Differential Path Vector
- Path element
- A tiny vector tangent to the integration loop.